Adding Serial Communication Protocol
SENT as Softcore to Microcontrollers
challange
Adding an additional communication interface to a microcontroller system often requires usage of another microcontroller and therefore a redesign of the whole hardware. The GTM has the capability to emulate communication interfaces (e.g. SENT, LIN, CAN) and multiplex them to a huge amount of general purpose I/Os. But developing such software-emulated communication interfaces using the GTM takes some effort and such drivers usually need to pass a conformity test.
solution
The CISC GTM IP Softcore library provides AUTOSAR conform drivers with its standardized APIs and the possibility of additional communication interfaces to existing microcontroller systems on-demand. The execution of this software is resource independent of the MCU and available for all high end microcontroller. Already available on the early version 1.5 of the Generic Timer IP module(GTM) from BOSCH, the SAE J2716 SENT protocol has been implemented by CISC as a library module to provide a point-to-point scheme for transmitting signal values from a sensor to a controller. It is intended to allow for transmission of high resolution data with a low system cost and reduced hardware cost compared to traditional solutions.
Challenges for Implementing the SENT Protocol
Implementing serial communication protocols require to address a couple of topics like:
Synchronization
Data rate detection
Bus arbitration
High clock variations (e.g. +/-20 % for SENT)
Allowed deviation between successive calibration pulses very low (e.g. +/-1.5625 % for SENT)
Error recovery
Of course, the Generic Timer IP module (GTM) allows different approaches for the SENT protocol implementation by ensuring accurate multi-input data acquisition and multi-output signal generation in automotive powertrain and active safety applications, or in industrial closed-loop applications.
Efficiency in Implementation
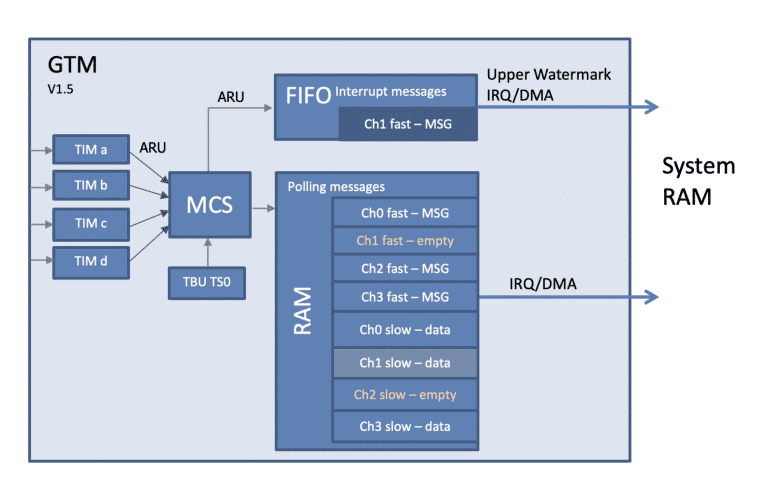
Our implementation allows already in the version 1.5 of the GTM up to 4 parallel SENT channels using one MCS. Our implementation supports:
3 µs clock tick
Fast/Slow channel reception
FIFO for interrupt messages
RAM for polling messages
Message diagnostics completely done by MCS
Based on the resources of the GTM version V1.5 we have implemented a solution that is shown in the picture close by.
Related Products
NFC WLC Development Platform
Boost Design and Robustness of NFC Based WLC Solutions.